Configurazione servomotore
Requisito: una scheda PWM Adafruit a 16 canali/12 bit è collegata tramite I²C e un servo modello è collegato al suo primo canale PWM.
Il SoftMotion Servo Example.project progetto contiene un'applicazione in cui CODESYS SoftMotion viene utilizzato in combinazione con i servomotori modello. Come interfaccia di comunicazione viene utilizzata una scheda di espansione (Adafruit ID 815) collegata tramite I²C.
Apri il
SoftMotion Servo Example.projectprogetto e aggiornarlo.Nella struttura dei dispositivi, fare doppio clic Dispositivo.
Si apre l'editor del dispositivo.
In Impostazioni di comunicazione, fare clic Scansione rete.
Se il tuo Raspberry Pi e il sistema di sviluppo si trovano sulla stessa rete, il tuo Raspberry Pi viene visualizzato per la selezione.
Selezionalo e fai clic .
L'applicazione viene scaricata sul tuo Raspberry Pi.
Avviare il programma (premere il F5 chiave).
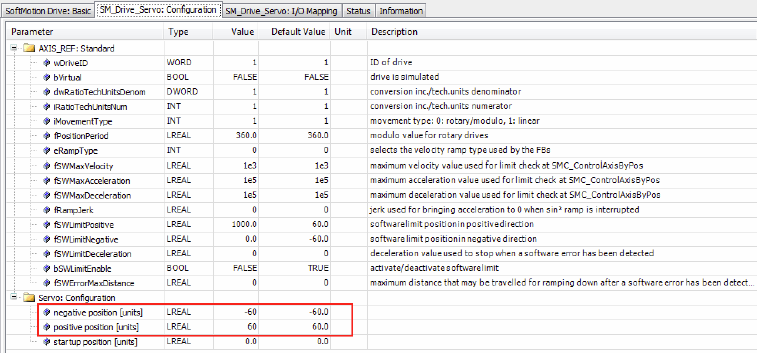
Il servomotore inizia a ruotare costantemente da sinistra a destra. Il
PLC_PRGprogramma implementato in SFC è responsabile di questo. Attiva l'asse e quindi lo sposta tra le posizioni -60 e +60 specificate come posizioni finali inSM_Drive_Servoconfigurazione dell'asse.La posizione preimpostata viene trasportata tramite l'interfaccia PWM, come di consueto con i servi di modellazione. Un impulso ALTO, di durata compresa tra 1 e 2 ms, viene trasmesso con una frequenza fissa (default: 50 Hz; parametro del dispositivo Adafruit PWM SoftMotion). 1 ms corrisponde alla posizione finale inferiore e 2 ms alla posizione finale superiore. La gamma di movimento varia da tipo di motore a tipo di motore. Se il motore è controllato in gradi angolari, è necessario misurare il raggio di movimento. Per fare ciò, guidare fino alle posizioni finali (nell'esempio -60, +60) e inserire le posizioni misurate nella schermata di configurazione:
Apri un qualsiasi browser (possibilmente su uno smartphone) e specifica l'indirizzo
<network address>:8080/webvisu.htm.La visualizzazione si apre e mostra la posizione specificata generata. Puoi controllare la velocità.